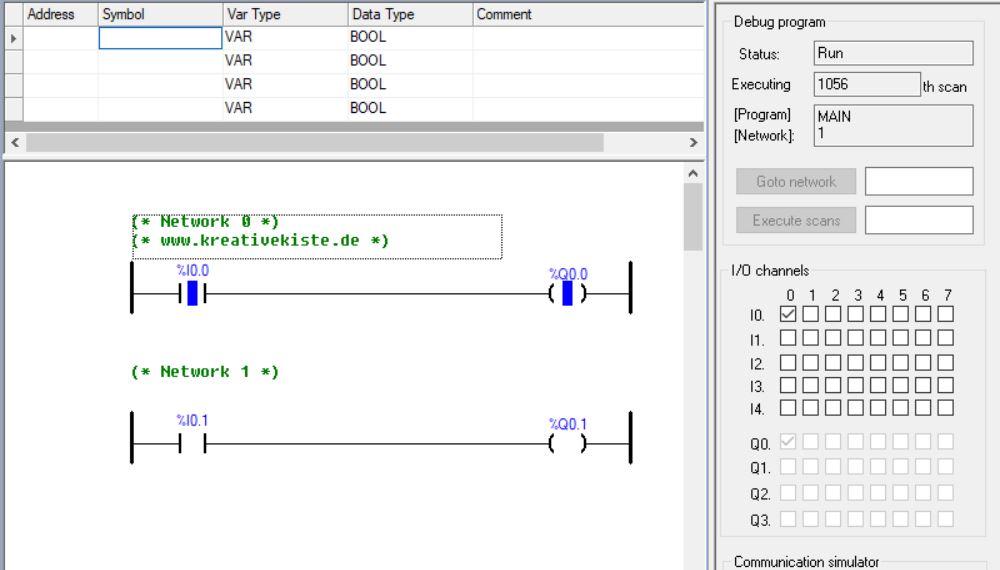
Bei der Planung und Realisierung von Regelungs- und Steuerungsaufgaben mit Verknüpfungen wie UND, ODER, XOR, sowie direkten Verbindung zwischen Eingang und Ausgang, ändert sich der Ausgangsoperand (Ausgang) immer parallel zum Eingangsoperanden (Eingang). Gut in der Simulation von KincoBuilder zu sehen. Im Oberen "Network" ist der Eingang geschlossen, deshalb ist der Ausgang aktiv also eingeschaltet. Sobald der Eingang wie im "Network" 2 zu sehen geöffnet ist, ist der Ausgang nicht mehr aktiv also ausgeschaltet.
In aller Regel braucht man beim programmieren von SPS aber eine Speicherung von Zuständen. Wenn sich der Eingang ändert, soll der Ausgang den aktuellen Zustand beibehalten (speichern). Besonders bei der Flankenauswertung wird ein "speicherndes Verhalten" des Ausgangsoperanden gebraucht, da bei einer Flankenauswertung lediglich ein kurzzeitiges Signal geliefert wird. Um dieses speichern zu realisieren gibt es in SPS Programen sogenannte Speicherglieder. Über ein rücksetzen wird diese Speicherung wieder aufgehoben. In der SPS Programmierung spricht man setzen und rücksetzen.
- Setzen bedeutet einen Zustand auf 1 bzw. EIN zu speichern
- Rücksetzen bedeutet einen Zustand wieder auf 0 bzw. AUS zu speichern
Im Beispiel unten setzt (einschalten) der Eingang I0.0 die Spule auf 1 ein und der Eingang I0.1 rücksetzt (ausschalten) die Spule wieder auf 0 AUS.
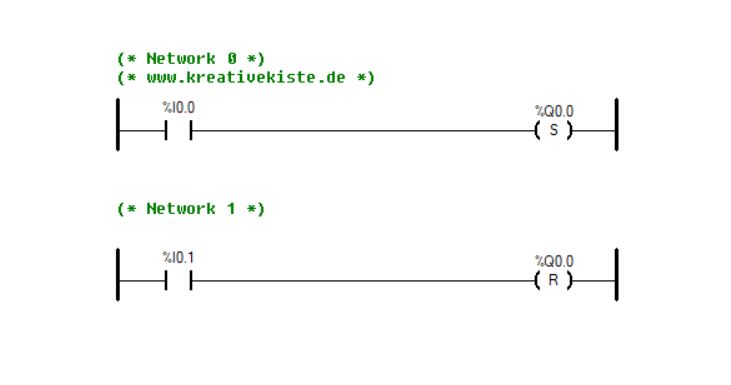
Nachteilig dieser Variante ist, dass die Übersicht verloren geht, da die Bedingungen zum Setzen und Rücksetzen an unterschiedlichen Stellen im Programm zu finden sind. Der Vorteil ist, dass man den Zustand des VKE nutzen kann und mehrere Setz- oder Rücksetzanweisungen auch hintereinander und an verschiedenen "Networks" eingeben kann.
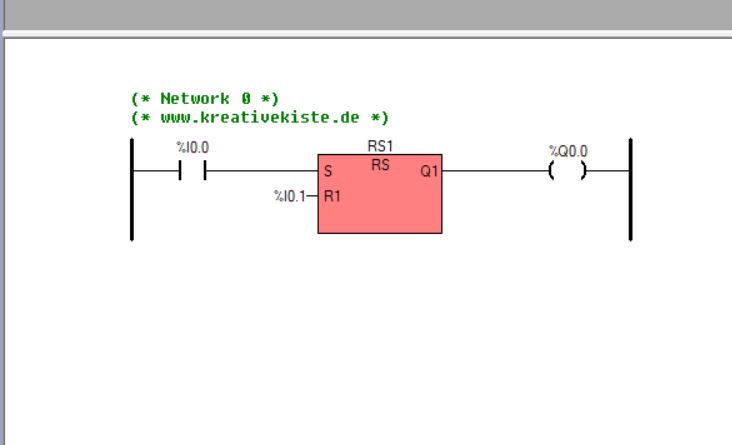
Um nicht jedes mal einen "aufwendigen" setze und rücksetze Befehl setzen zu müssen gibt es fertige Funktionen die das setzen (S) und Rücksetzen (R) übernehmen. Deshalb nennt man diese auch SR- oder RS-Glieder. Wird der Eingang 0.0 betätigt (S) dann wird das RS Gesetze und der Ausgang 1 EIN, wird dagegen der Eingang 0.1 (R1) betätigt wird das RS zurück gesetzt und der Ausgang 0 AUS.
Unterschied zwischen SR und RS
- SR-Glieder sind rücksetzdominant
- RS-Glieder sind setzdominant
Dominat bedeutet lediglich welcher Eingang "Vorrang" hat wenn beide Eingangsoperanten (Eingänge) also S und R aktiv sind sind. Dabei ist es egal zu welchem Zeitpunkt der zweite Eingang aktiv wird. Einer der beiden Eingänge hat immer Vorrang. Wie wichtig dieses Verhalten ist wird deutlich wenn man sich zum Beispiel einen Not aus Schalter ansieht. Sobald dieser gedrückt wird, muss dieser Vorrang haben (dominant sein).
In der Simulation von KincoBuilder sieht man dass beide Eingänge EIN sind, doch der Ausgang im Network 0 ist 0 also AUS und im Network 1 ist 1 also EIN ist. Schaut man sich das RS und SR genau an dann sieht man die "1" hinter dem S bzw. R dieser Eingang hat Vorrang und ist damit "dominante". Egal ob der andere Eingang 0 der 1 ist der "dominante" hat immer Vorrang.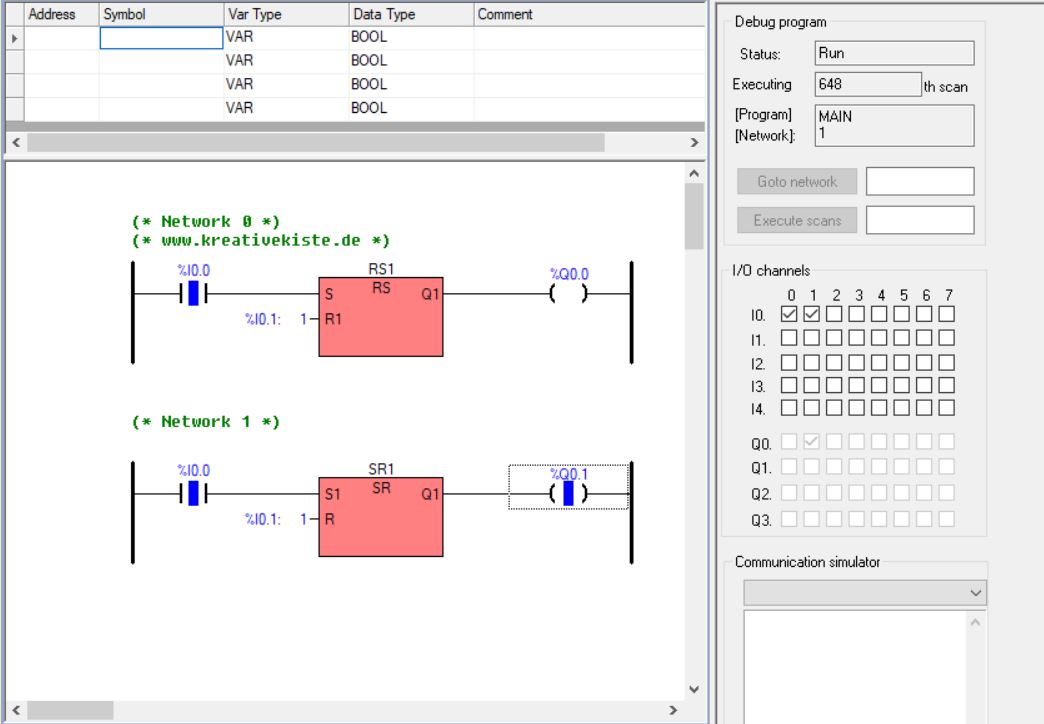
Die Unterscheidung zwischen setz- und rücksetzdominanten Speichergliedern ist deshalb sehr wichtig, da es oft vorkommt dass an beiden Eingängen (Setz- und Rücksetzeingang) ein Signal von 1 EIN anliegt. In solchen Fällen muss klar sein was durch die SPS geschaltet werden soll, setzen oder rücksetzen. Bei setzdominanten (RS-Gliedern) Speichergliedern wird gesetzt, bei rücksetzdominanten (SR-Gliedern) wird rückgesetzt.

