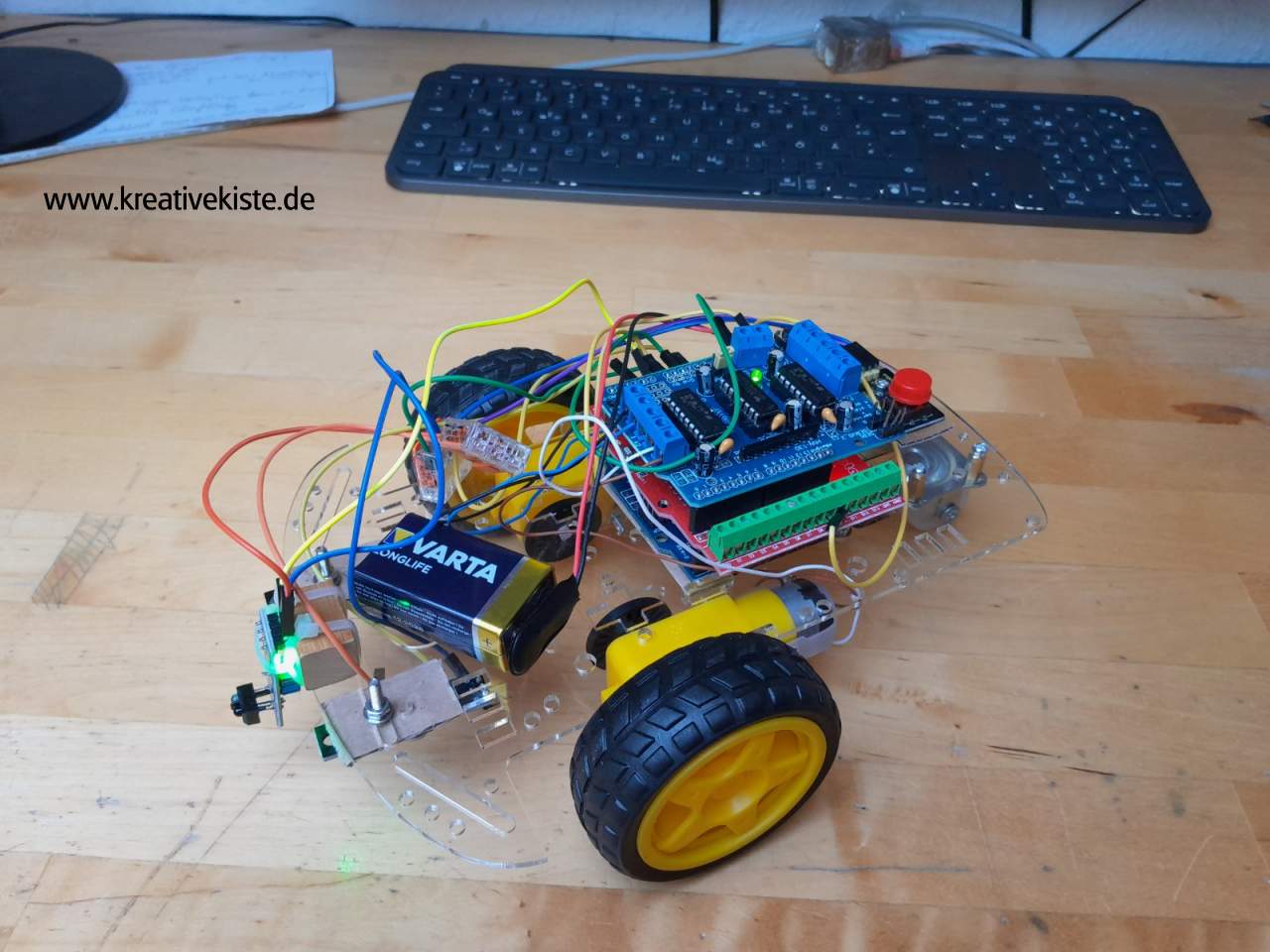
Mit einem 2WD Chassis, einem Arduino und Ardublock lässt sich ein ganz einfach Auto bauen dass Hindernisse erkennt und dann weiterfährt. Als erstes soll es nur darum gehen mit dem 2WD Chassis vorwärts zu fahren und wenn ein Hindernis erkannt wird soll das Fahrzeug umdrehen und dann weiterfahren. Natürlich hat dies keinen praktischen nutzen aber es soll ja nur darum gehen sich mit dem Fahrzeug vertraut zu machen.
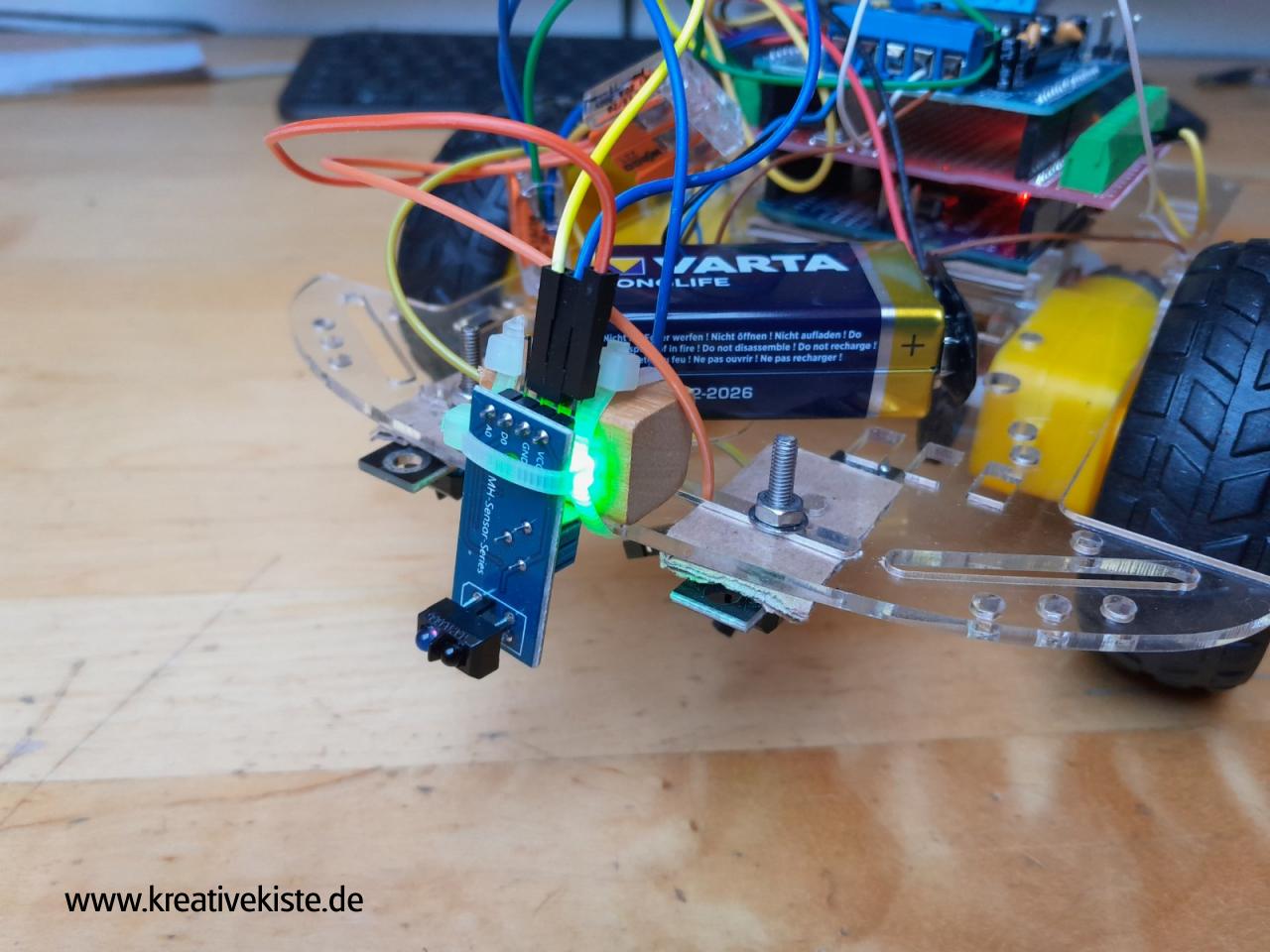
Um die Hindernisse zu erkennen habe ich einen Näherungssensor verwendet. Besser wäre es 2 oder 3 dieser Sensoren zu verwenden, dann wird auch garantiert jedes Hindernis erkannt.
Ich versorge den Arduino und das 2WD mit jeweils 9 Volt, damit kann das Auto ohne Kabel getestet werden.
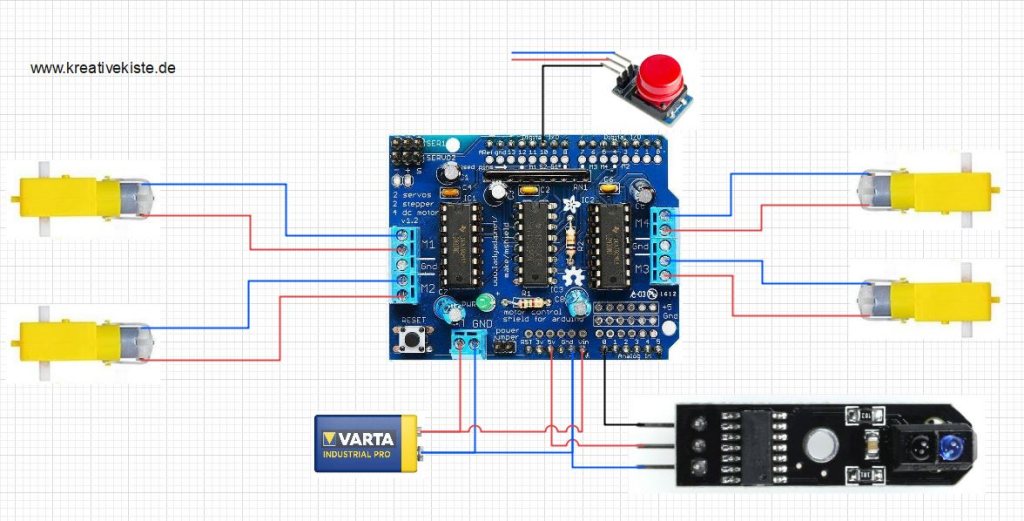
Hier die Verdrahtung, wichtig ist den Jumper zu entfernen sonst kann der Arduino beschädigt werden. Es müssen nur die Motoren 3 und 4 angeschlossen werden, die Motoren 1 und 2 sind für die nächsten Projekte dann.
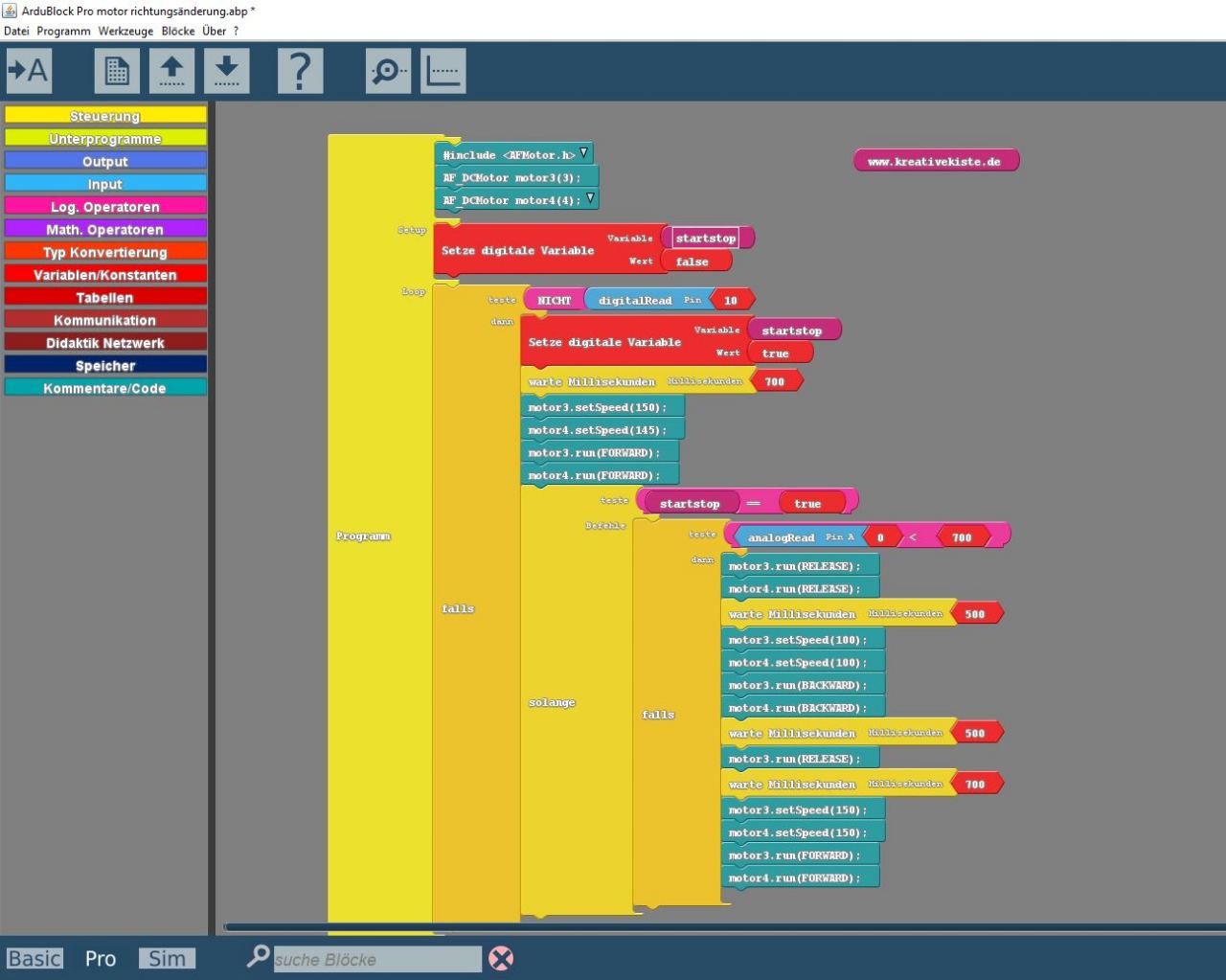
Das Programm ist recht simpel. Alle Code Texte für das Motor Shield findet ihr hier auf meiner Seite: https://www.kreativekiste.de/l293d-motortreiber-shield-fuer-arduino-hw-130-mit-ardublock-programmieren.
- Über einen Taster am digitalen Eingang wird eine digitale Variable auf "true" gesetzt.
- Beide Motoren werden über "setSpeed" nun gestartet. Vermutlich wegen nicht so toller Qualität, drehen sich die Motoren unterschiedlich, deshalb habe ich einen auf 150 und den anderen auf 145 gestellt.
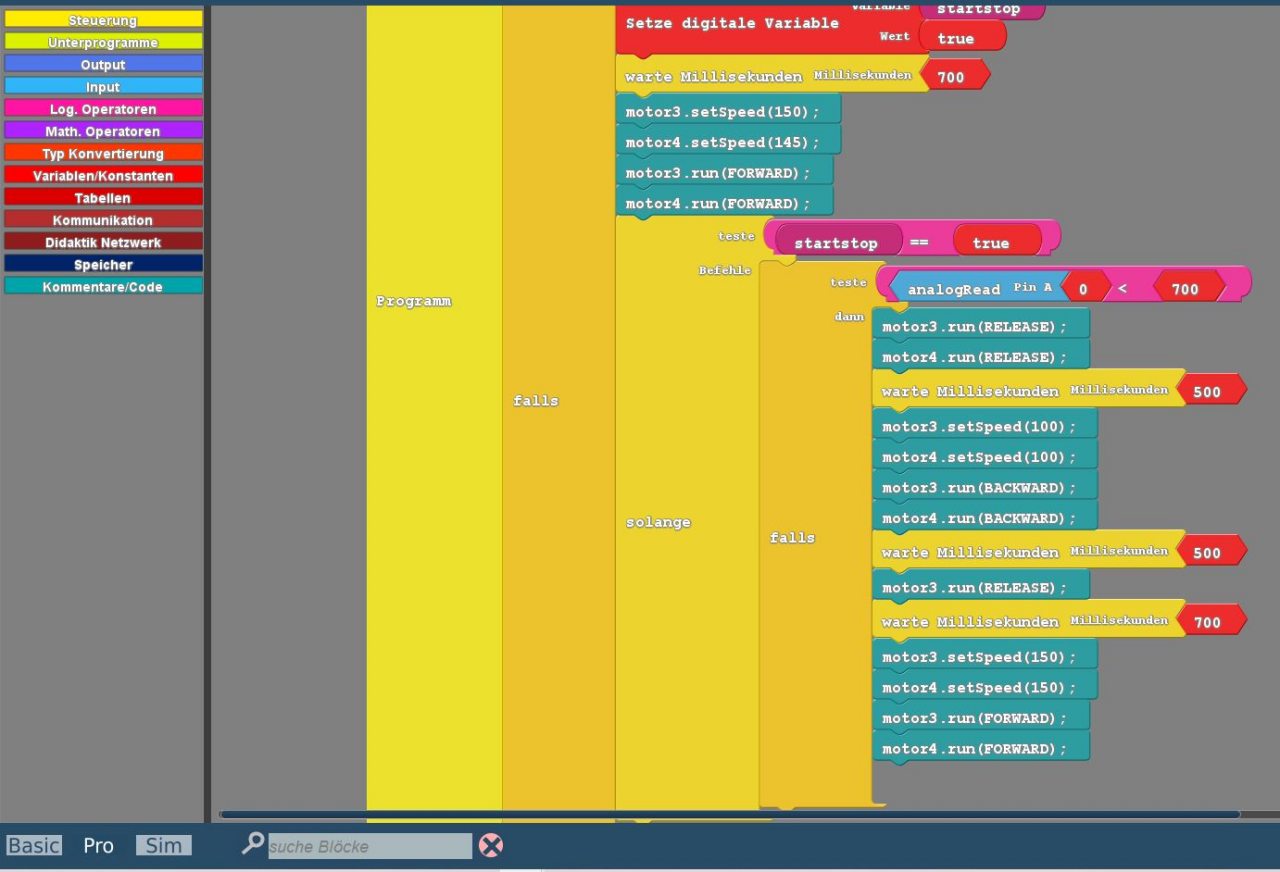
- Da die Variable "startstop" bis zum resett auf "true" steht, wird der "solange" block nun ausgeführt.
- Der Näherungssensor, der am analogen Eingang angeschlossen ist, wird über eine "größer als" Funktion abgefragt.
- Wird ein Hindernis erkannt, stoppt der Motor, dreht dann Rückwärts, ein Rad stoppt (das Auto dreht sich) und fährt dann weiter.
- Es wird auf ein neues Hindernis gewartet.