Meine Kinder wollten eigentlich nur ein Boot aus Styropor bauen. Wobei ich mir nicht sicher bin ob sie einfach gerne mit dem Styropor schneider arbeiten oder wirklich ein Boot bauen wollten. Egal. Nachdem das Boot fertig war, wollten sie ein noch einen Motor drauf habe und ja, gleich mit einer Fernsteuerung. Ok da sie alle gerne mit Elektronik arbeiten habe ich mal geschaut was ich alles da habe für so ein Boot.
Aus den gefunden Teilen ist ein Boot DC Motor und Propeller als Antrieb und einem Servo Motor zum lenken geworden. Da ich kein Ruder bauen wollte habe ich den Motor mit Propeller auf dem Servo befestigt.
Die Lenkung ist etwas gewöhnungsbedürftig, da sich beim lenken das Heck dreht. Das heißt man muss das Boot in die Richtung stellen in die man Fahren möchte und kann dann gerade aus fahren. Die ganze "Technik" ist nur lose auf dem Boot, fest eingebaut habe ich nicht, es ist nur ein Experiment. Das meinen Kids aber viel Spaß gemacht hat und vor allem haben sie viel gelernt.
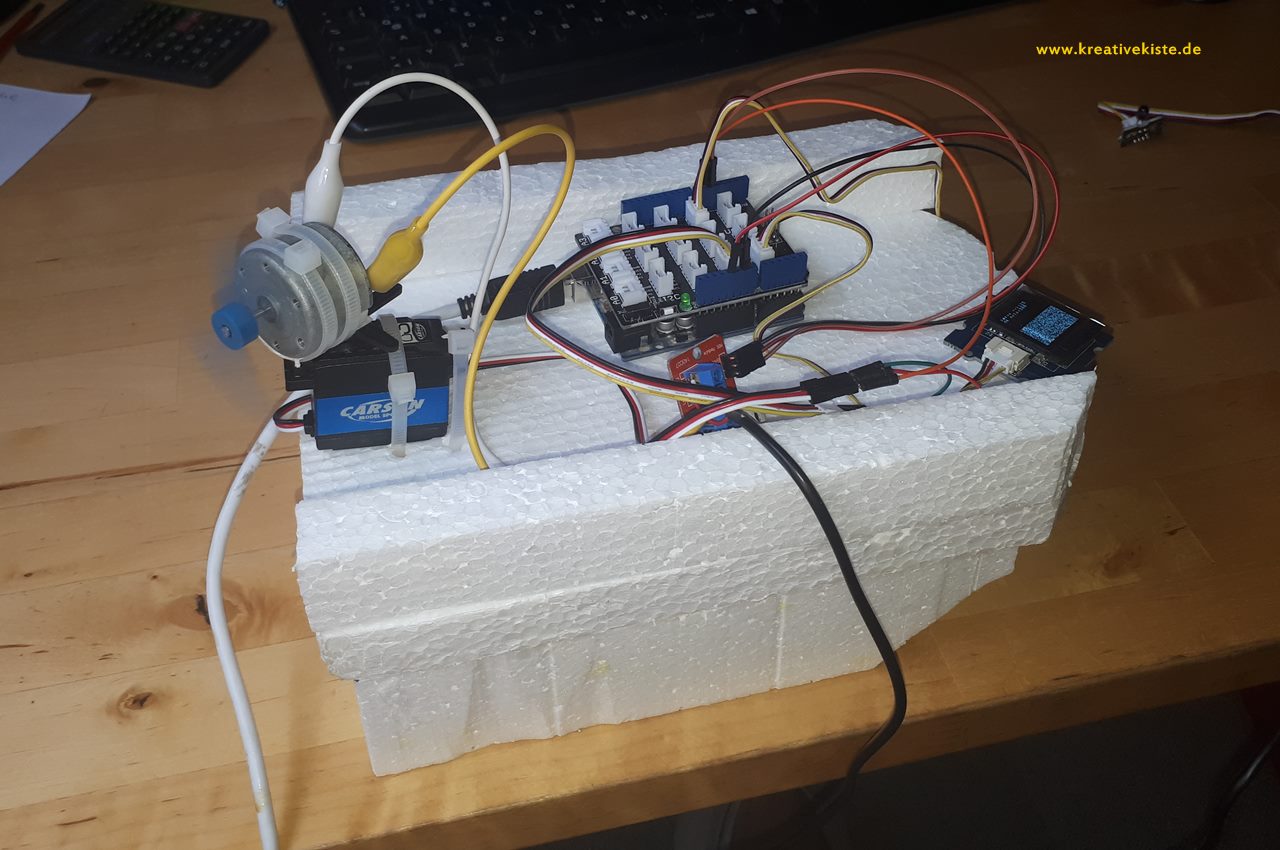
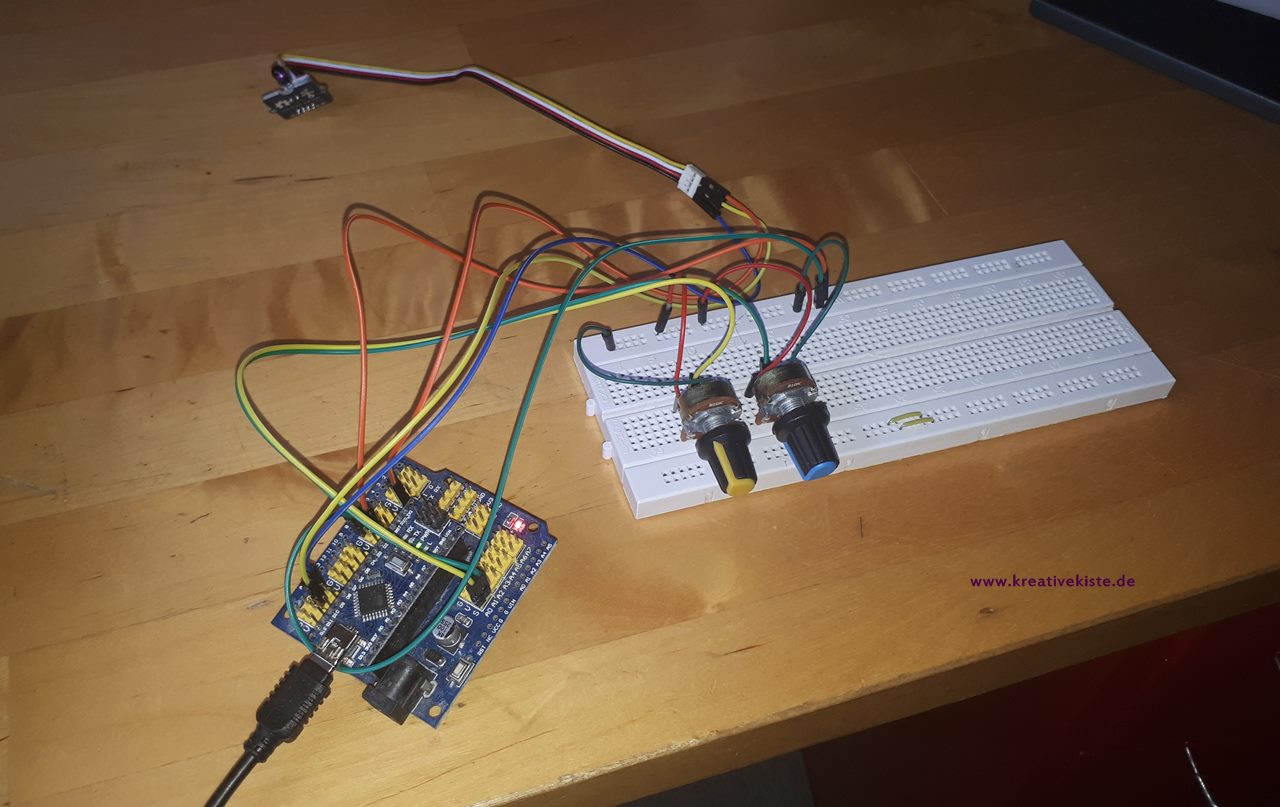
Leider hatte ich in der Bastelkiste nur eine IR Fernbedienung. Aber die kann ja fast 10 Meter. Das hat für uns gereicht. Der DC Motor ist über ein fertiges Mosfet Modul und PWM angesteuert. Über zwei Potis wird die Geschwindigkeit des Motors gesteuert, über einen zweiten Poti wird die Servo Stellung vorgegeben. Auf dem Bild oben der Empfänger mit Motoren und auf dem Bild unten, der Sender mit Potis.
Das Sende Programm --> RC Boot
Das senden und empfangen ist über eine IR LED nicht ganz einfach. Da ich mit Ardublock zahlen senden muss. Also habe ich für den Servo die Zahlen 0-180 und für den Motor die Zahlen 200-700 verwendet. Ich lesen also den Poti von 0-1020 aus und wandle diese Zahl über den "zuordnen" Block in 0-180 bzw in 200-700 um. Nach dem auslesen und zuordnen sende ich die Zahl dann direkt über die IR LED an das Boot. Zur Kontrolle habe ich noch die beiden serial printIn Blöcke, diese können aber auch entfernt werden.
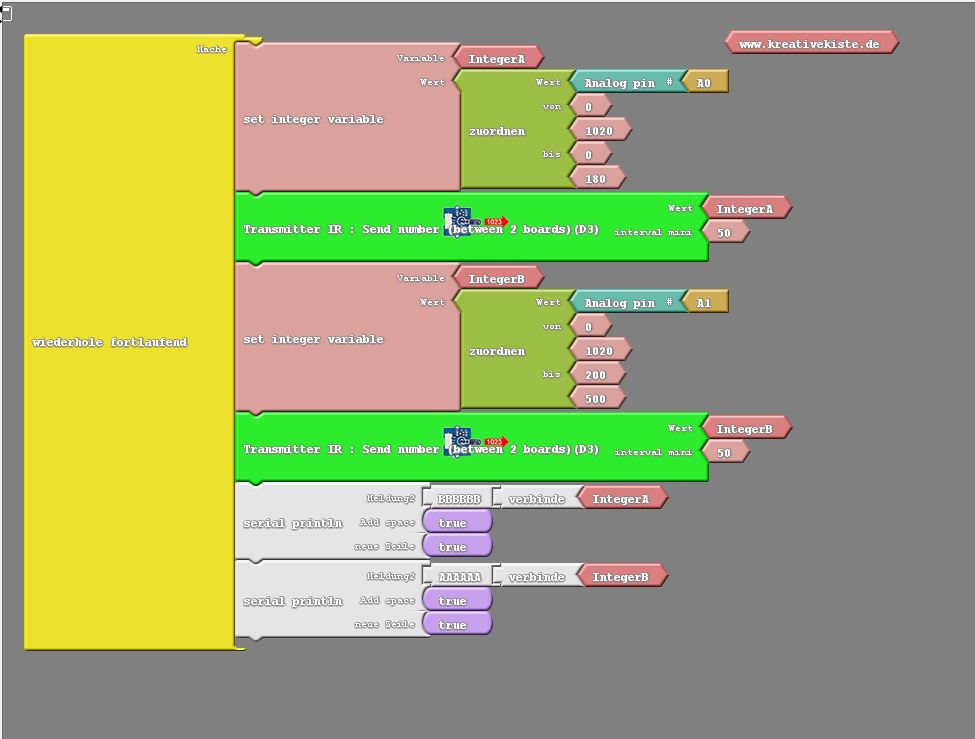
Die Hardware besteht nur aus der Sende IR LED und den beden Potis. 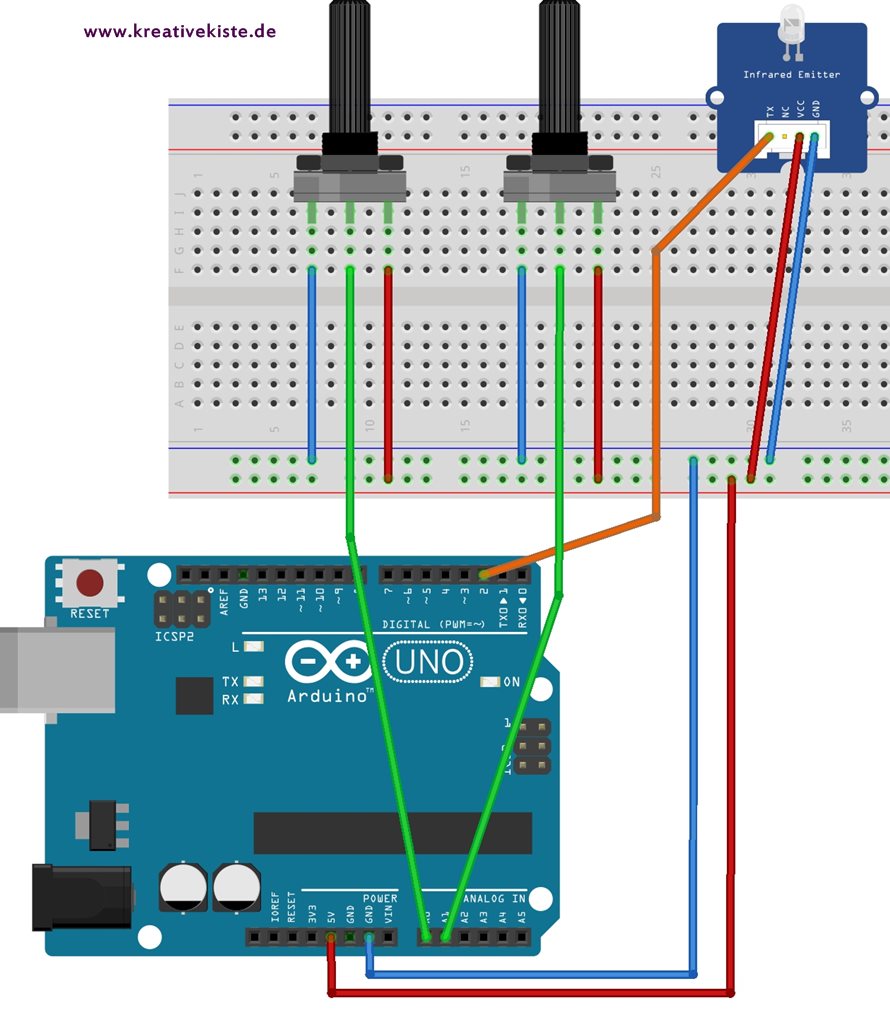
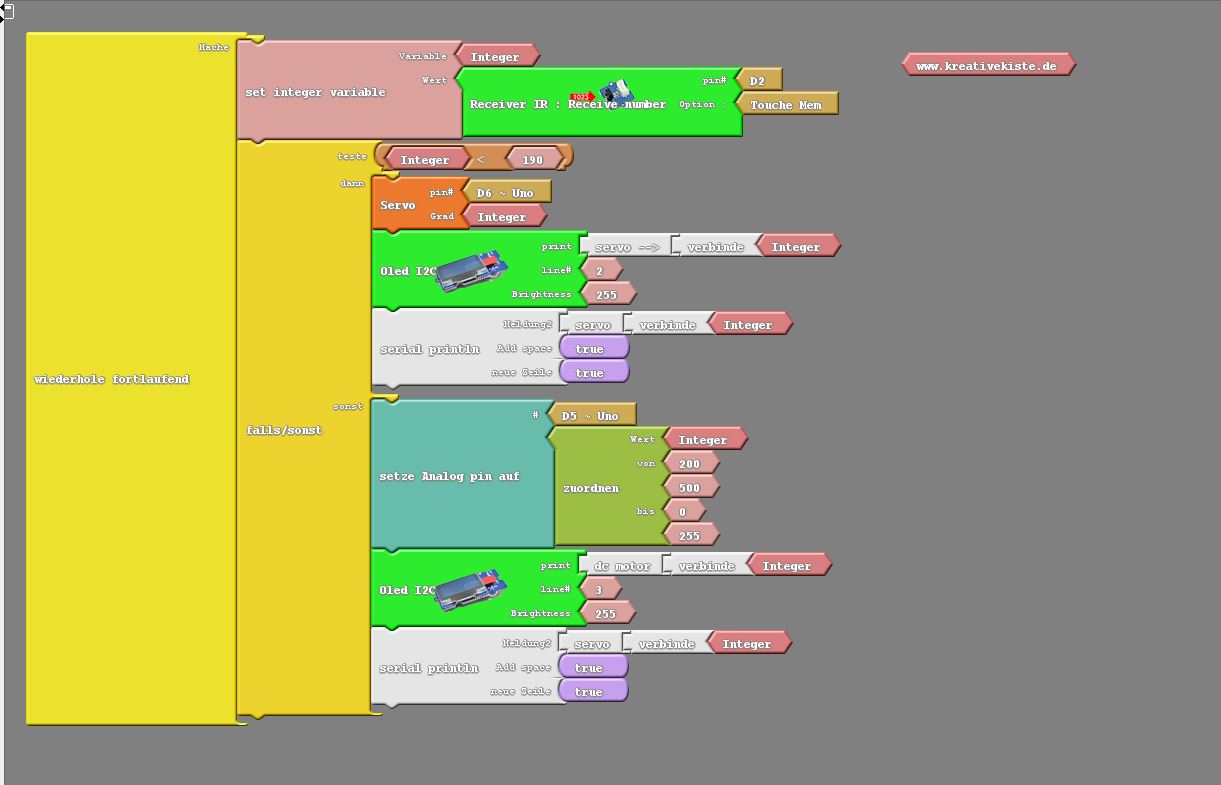
Das Empfänger Programm --> RC Boot
Das Programm zum empfangen und steuern ist auch nicht kompliziert. Zuerst werden die beiden Zahlen empfangen und dann über einen "falls/sonnst" Block zugeordnet. Ist die Zahl kleiner als 190, dann ist sie für Stellung den Servomotor bestimmt. Ist sie "nicht" kleiner als 190, sonder "größer" dann ist sie für die Geschwindigkeit des Dc Antriebs bestimmt. Die zahlen für den Servomotor müssen nicht zugeordnet werden, da der Servomotor 0-180 Grad fahren kann. Die Zahlen für den DC Motor müssen noch zugeordnet werden, da der PWM Ausgang 0-255 ist.
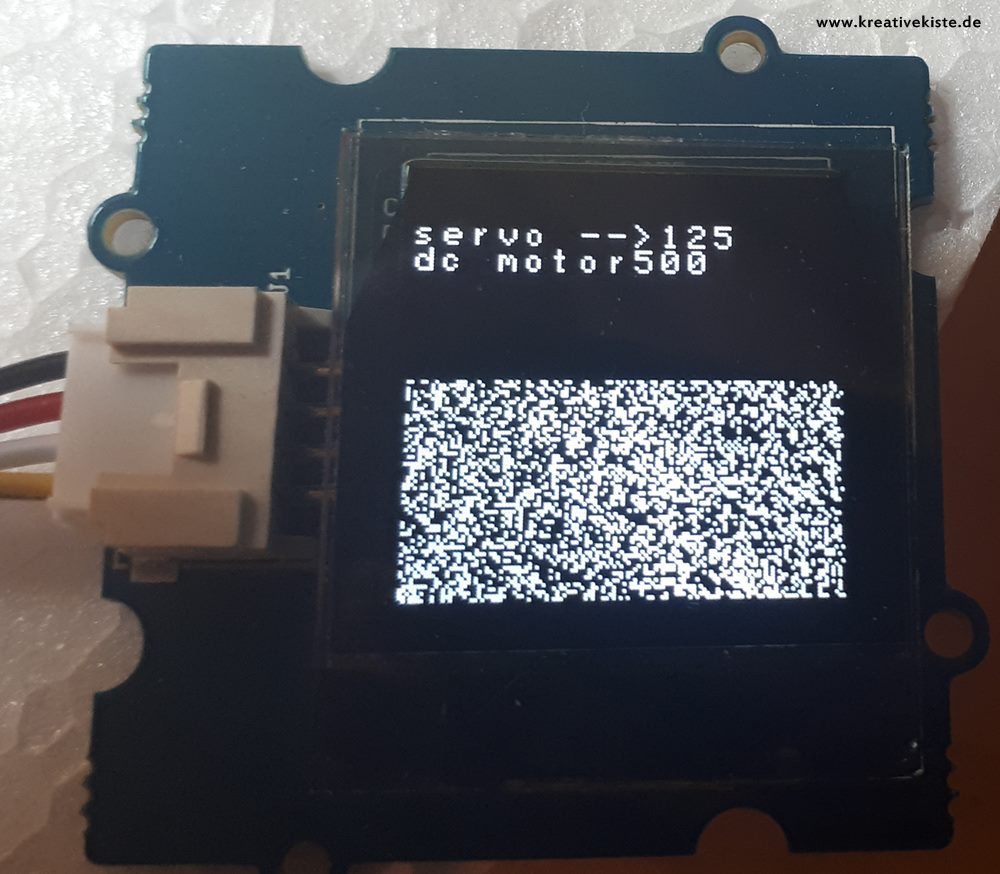
Die Hardware besteht aus dem IR Empfänger, der DC und Servo Motor, einem Mosfet Shild und einem OLED Display. Der Motor sollte wenig Kraft und viel Geschwindigkeit haben. Gegebenenfalls mit einem Getriebe arbeiten. Ich hatte einen DC Motor von einem alten Taschenventilator, der hatte die richtige Geschwindigkeit.
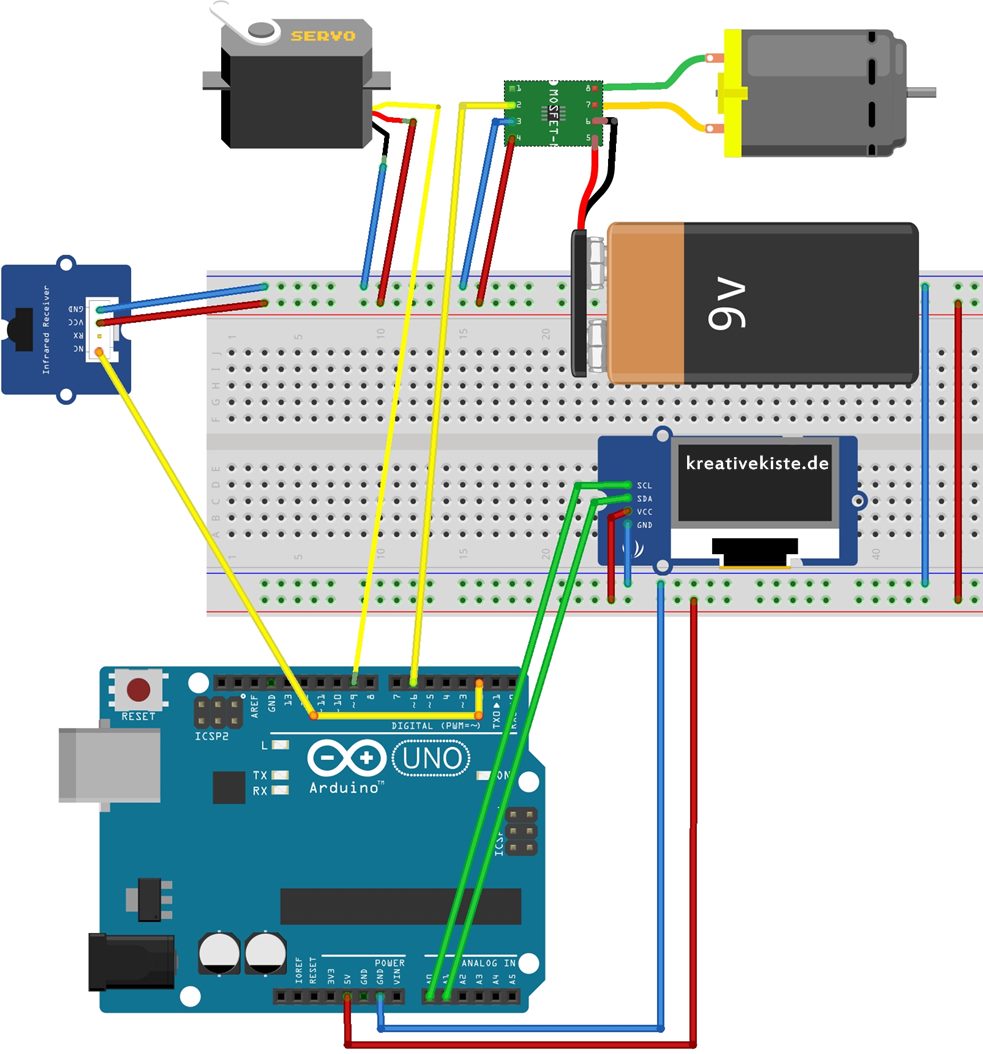
Das OLED Display habe ich nur zur Kontrolle eingebaut. Auf diesem können die Werte nach dem empfangen und zuordnen abgelesen werden.